Robot Engineering
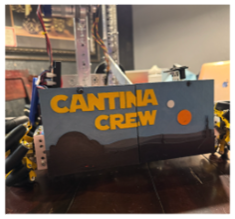
Canina Crew’s engineering team achieved their goals through many meticulous steps, those of which changed as the team progressed over the years. This season, they have prioritized having the arm of the robot be long enough to reach the two hanging bars and lower bucket on the field. This design allows the driver to quickly and efficiently score points. Jabba was made up of a mecanum wheel drive, a 180-degree “flip” arm, and a two-servo claw. Changes to the robot were continuously improved and redesigned to increase consistency and stability while allowing for innovative engineering. The result was a well-flowing robot that allowed the driver to perform her job easily.
Cantina Crew incorporated several new elements this season, including a front plate, back push plate, and two number plates, all enhancing the representation of their STAR WARS theme.

While the team made significant strides in aesthetics and organization, this year proved especially challenging for arm design. Despite numerous setbacks, they remained persistent, continuously iterating and problem-solving to find effective solutions. Looking ahead, they plan to implement further modifications, such as LED lights and overlay designs, to achieve a polished, professional finish.
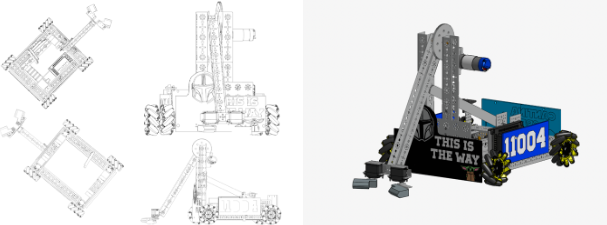
CAD Modeling
Cantina Crew continues to work hard to increase their CAD modeling skills. This includes a full 3D model of Jabba, all the way down to each screw on the robot. Software such as this allowed the team to experiment with various materials, strategies, and how the robot will interact with other objects in a safe, predictable, environment.